Messaging
Video Processing Platform Embedded Stream Processor supports two-way communication between the edge device and server applications.
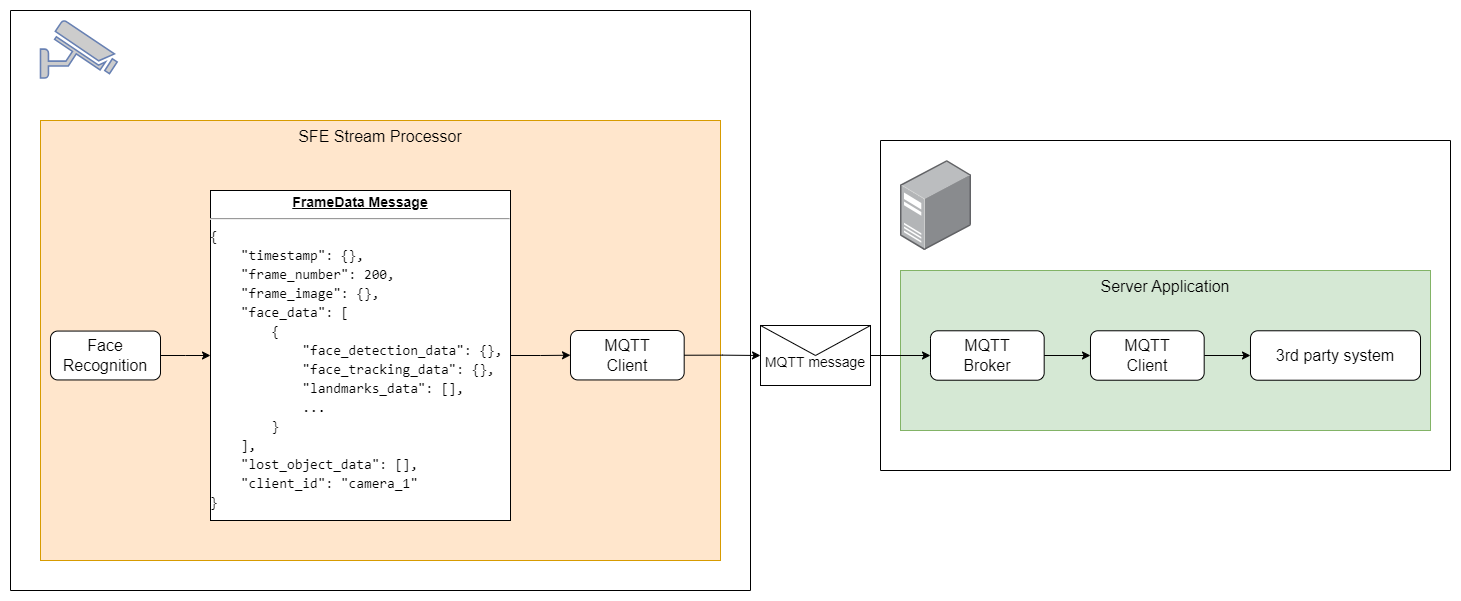
Stream processor uses MQTT protocol to send face recognition results and metadata (FrameData) from edge device to your local or server application. If you don’t want to use MQTT, we support sending the FrameData also using Websocket protocol.
The format of the FrameData message with an example message can be found below:
SFE Stream Processor Frame Data via MQTT
This part of the documentation describes the MQTT topic used by the Video Processing Platform Embedded Stream Processor for sending the FrameData.
Using MQTT for communication with the camera requires the MQTT broker and MQTT Client to run as part of your solution.
Video Processing Platform is already integrated with SFE Stream Processor using MQTT.
Root topic
All topics are prefixed with the root topic (:settings.connection.topic) and client ID (:settings.connection.client_id) which are configured in the settings file.
FrameData Topic
:topic/:client_id/frame_data
=> Periodic(FrameData)
FrameData topic is currently the primary output topic of the stream processor. It is used to periodically send the frame data to the MQTT broker. Depending on the configuration, the frame data can contain the following information:
- Face detection bounding boxes
- Face landmarks
- Face crops
- Face templates
- Face identification results
- Face liveness detection results
- Active tracking ids
- New tracking ids
- Lost tracking ids
- Full frame data
See also the frame_data proto message format
FrameData Message Format
SFE Stream Processor supports sending FrameData messages in the following formats:
- Protobuf (default),
- Json,
- Yaml
To change the format of the message you need to change messaging.format in the configuration. The content of the message depends on SFE Stream Processor Configuration See also an example FrameData message See the frame_data protobuf message
FrameData message example (Json)
{
"timestamp": {
"seconds": 1688110510,
"nanos": 440625640
},
"frame_number": 200,
"frame_image": {
"width": 1280,
"height": 720,
"data": null,
"image_format": 0
},
"face_data": [
{
"face_detection_data": {
"bounding_box": {
"x": 0.61946577,
"y": 0.3427477,
"width": 0.13254198,
"height": 0.30173743
},
"detection_confidence": 0.24703383,
"raw_detection_confidence": 0.99232244
},
"face_tracking_data": {
"tracking_id": 3,
"tracking_uuid": "c8052a96-8c9d-4765-be94-1d6282cf4b32",
"tracking_state": 1
},
"landmarks_data": [
{
"keypoint_type": 0,
"confidence": 6555.97,
"x": 0.6450057,
"y": 0.45749876
},
{
"keypoint_type": 1,
"confidence": 7688.9907,
"x": 0.655019,
"y": 0.45629612
},
{
"keypoint_type": 2,
"confidence": 8230.616,
"x": 0.66622674,
"y": 0.4607573
},
{
"keypoint_type": 3,
"confidence": 8671.502,
"x": 0.69593364,
"y": 0.46342638
},
{
"keypoint_type": 4,
"confidence": 9183.3125,
"x": 0.7068537,
"y": 0.4600336
},
{
"keypoint_type": 5,
"confidence": 9303.206,
"x": 0.71774375,
"y": 0.46332029
},
{
"keypoint_type": 6,
"confidence": 9617.738,
"x": 0.68052393,
"y": 0.46196705
},
{
"keypoint_type": 7,
"confidence": 8992.809,
"x": 0.666,
"y": 0.5363946
},
{
"keypoint_type": 8,
"confidence": 9485.234,
"x": 0.6776546,
"y": 0.53633755
},
{
"keypoint_type": 9,
"confidence": 9714.433,
"x": 0.6920333,
"y": 0.53950506
},
{
"keypoint_type": 10,
"confidence": 8822.452,
"x": 0.6788875,
"y": 0.54646987
},
{
"keypoint_type": 11,
"confidence": 8965.842,
"x": 0.66079986,
"y": 0.56907797
},
{
"keypoint_type": 12,
"confidence": 9792.486,
"x": 0.679145,
"y": 0.5778152
},
{
"keypoint_type": 13,
"confidence": 9667.067,
"x": 0.6996888,
"y": 0.57404685
},
{
"keypoint_type": 14,
"confidence": 9861.519,
"x": 0.67930084,
"y": 0.56860363
},
{
"keypoint_type": 15,
"confidence": 9939.953,
"x": 0.679856,
"y": 0.59032
},
{
"keypoint_type": 16,
"confidence": 7141.656,
"x": 0.63856435,
"y": 0.43423924
},
{
"keypoint_type": 17,
"confidence": 8929.125,
"x": 0.66690445,
"y": 0.43565476
},
{
"keypoint_type": 18,
"confidence": 9254.477,
"x": 0.6952186,
"y": 0.43642095
},
{
"keypoint_type": 19,
"confidence": 8736.874,
"x": 0.72563595,
"y": 0.4419014
},
{
"keypoint_type": 20,
"confidence": 6720.5347,
"x": 0.6298149,
"y": 0.46593603
},
{
"keypoint_type": 21,
"confidence": 9549.333,
"x": 0.67872494,
"y": 0.641848
},
{
"keypoint_type": 22,
"confidence": 7431.887,
"x": 0.7382992,
"y": 0.47668388
}
],
"face_mask_data": {
"confidence": -3390.0
},
"cropping_data": {
"crop_extension": 2,
"crop_box": {
"x": 0.5211221,
"y": 0.23136452,
"width": 0.31893653,
"height": 0.56699824
},
"crop_image": {
"width": 250,
"height": 250,
"data": "...",
"image_format": 0
}
},
"liveness_data": [
{
"liveness_type": 1,
"score": 0.7390711,
"raw_score": 0.256,
"liveness_conditions": [],
"codnitions_met": false
}
],
"template_data": {
"template": "SUNGADFY/PwKA/8G9P71AAQD+ggJ8wH6CAIGBf4DB/oD/vn+CfwCBfgADgcNAf4ABAf8CP4L+Pz0+QYGCAkH/gIC//sKAwIEAwEDBAID+v4DDAcFAwUMAPcBCgAAAfoLBwQBAgMB/P74AQcA/wAACQL8APMFBf8BAwIGAgH9Bv3++wP9AfoB9vr+/AYD+gYEAP0CAwgH9/v4AgECAQEHAQQCAAD+BQLzC/wD/v0L/QH7/wsA/gX9//gH9v38Av8HAADzAAYA/P78APz9Cf8EBgEBAPgBAAgBAwUDAvYQAP/7+vj4AgAE/wD5Bf8C/gH8+g74A/oIBf78BfoFAfwHD/T++gIB/Pr+AAUDBQMLAAD6C/8EBv8F/An+Av/9+AL+Awn3Awn4AQT5Av79B/8F/fnzAfb8+gL+/QUI//35/wf6/P//DwID/gMFC/38+gUCAQAAAwAF/AML8/0KCvf6/f8B+/7++QALAgj6AQUL+wL///n/BAH/CAT8/AIE/gcI+f0BAP77/wMI/gACB/r2AgoIAgb09/8C+f4C/Pf4Bf0CAvgBAP/7A/cAAP4HBwH8/vv7/voA/v75AAD7BvsCBgH5Av8ECgID/AT0AwT7+QAFBPn/9AsEBgQEAQQE/P3zBPz9A/r5AP0D/gP+/gYPBP77Avf69woECQH+A/r5EgQF/gH6AQZTBnP/"
},
"identification_data": [
{
"id": 0,
"uuid": "b8f21151-0c8e-4c6a-8f29-882b405ff9aa",
"score": 0.41636264,
"dsid": "GEN_ID_dbd738aa-cb94-4766-89d4-a2dfd79ffc0c||2",
"meta_data": []
}
],
"identification": true
}
],
"lost_object_data": [],
"client_id": "dev"
}
Protobuf Messages
SFE Stream Processor protobuf messages are documented below:
- innovatrics.embedded.stream_processor.frame_data
- innovatrics.embedded.stream_processor.common
- innovatrics.embedded.stream_processor.health
- innovatrics.embedded.stream_processor.db
- innovatrics.embedded.stream_processor.user
frame_data
You can find the innovatrics.embedded.stream_processor.frame_data protobuf message structure below.
innovatrics.embedded.stream_processor.frame_data imports also common.proto
syntax = "proto3";
package innovatrics.embedded.stream_processor.frame_data;
import "google/protobuf/timestamp.proto";
import "innovatrics/embedded/stream_processor/common.proto";
message FrameData {
// timestamp of the frame the message was generated for
google.protobuf.Timestamp timestamp = 1;
// incremental frame number
uint64 frame_number = 2;
// full frame image
innovatrics.embedded.stream_processor.common.Image frame_image = 3;
// vector of detected faces
repeated FaceData face_data = 4;
// vector of lost objects
repeated LostObjectData lost_object_data = 5;
// client_id (same as MQTT client ID) of the source camera/device which produced the message
string client_id = 6;
}
message FaceData {
// face detection data
FaceDetectionData face_detection_data = 1;
// face tracking data
TrackingData face_tracking_data = 2;
// face landmarks data
repeated FaceLandmarkData landmarks_data = 3;
// face mask status data
optional FaceMaskData face_mask_data = 4;
// cropping data
optional CroppingData cropping_data = 5;
// liveness detection data
repeated LivenessData liveness_data = 6;
// face template extraction
optional innovatrics.embedded.stream_processor.common.TemplateData template_data = 7;
// face identification
repeated IdentificationData identification_data = 8;
// face ifentification was performed
bool identification = 9;
}
message FaceDetectionData {
// bounding box of detected face
innovatrics.embedded.stream_processor.common.BoundingBox bounding_box = 1;
// normalized value detection confidence of detected face - range <0,1>
float detection_confidence = 2;
// raw value of detection confidence of detected face - range <0,1>
float raw_detection_confidence = 3;
}
message TrackingData {
// tracking ID (ByteTrack) assigned to detected object
uint32 tracking_id = 1;
// tracking UUID assigned to detected object
string tracking_uuid = 2;
// tracking state (ByteTrack) of detected object
TrackingState tracking_state = 3;
}
message FaceLandmarkData {
// type of the keypoint detected in the face
FaceKeypointType keypoint_type = 1;
// confidence of the keypoint detected in the face - range <0,1>
float confidence = 2;
// X coordinate of the keypoint relative to full frame - range <0,1>
float x = 3;
// Y coordinate of the keypoint relative to full frame - range <0,1>
float y = 4;
}
message FaceMaskData {
// face mask detection confidence - range <0,1>
float confidence = 1;
}
message CroppingData {
// extension of the crop image specified in settings
uint32 crop_extension = 1;
// bounding box of the crop
optional innovatrics.embedded.stream_processor.common.BoundingBox crop_box = 2;
// crop image of detected object
optional innovatrics.embedded.stream_processor.common.Image crop_image = 3;
}
message IdentificationData {
// entity id, deprecated
uint32 id = 1;
// uuid - unique 36 character string (32 digits separated by hyphens)
string uuid = 2;
// match score
float score = 3;
// DSID
string dsid = 4;
// User metadata
repeated innovatrics.embedded.stream_processor.common.MetaData meta_data = 5;
}
// tracking state enumeration (defined by ByteTrack)
enum TrackingState {
New = 0;
Tracked = 1;
Lost = 2;
Removed = 3;
reserved 4 to max;
}
// face keypoint type enumeration
enum FaceKeypointType {
RightEyeOuterCorner = 0;
RightEyeCentre = 1;
RightEyeInnerCorner = 2;
LeftEyeInnerCorner = 3;
LeftEyeCentre = 4;
LeftEyeOuterCorner = 5;
NoseRoot = 6;
NoseRightBottom = 7;
NoseTip = 8;
NoseLeftBottom = 9;
NoseBottom = 10;
MouthRightCorner = 11;
MouthCenter = 12;
MouthLeftCorner = 13;
MouthUpperEdge = 14;
MouthLowerEdge = 15;
RightEyebrowOuterEnd = 16;
RightEyebrowInnerEnd = 17;
LeftEyebrowInnerEnd = 18;
LeftEyebrowOuterEnd = 19;
RightEdge = 20;
ChinTip = 21;
LeftEdge = 22;
reserved 23 to max;
}
// Liveness data
message LivenessData {
// type of liveness detection algorithm
LivenessType liveness_type = 1;
// liveness detection score, default 0
float score = 2;
// liveness detection raw score, default 0
float raw_score = 3;
// liveness conditions and thresholds
repeated Condition liveness_conditions = 4;
// liveness conditions were met, default false
bool conditions_met = 5;
}
// liveness detection algorithm enumeration
enum LivenessType {
// Passive liveness calculated from distant solver
PassiveDistant = 0;
// Passive liveness calculated from nearby solver
PassiveNearby = 1;
reserved 2 to max;
}
// condition type enumeration
enum ConditionType {
FaceSize = 0;
FaceRelativeArea = 1;
FaceRelativeAreaInImage = 2;
YawAngle = 3;
PitchAngle = 4;
RollAngle = 5;
Sharpness = 6;
Brightness = 7;
Contrast = 8;
reserved 9 to max;
}
message Condition {
// condition type
ConditionType condition_type = 1;
// raw value of the condition
float value = 2;
// lower threshold
optional float lower_threshold = 4;
// optional upper threshold
optional float upper_threshold = 5;
// tag if conditions for liveness evaluation were met
bool condition_met = 6;
}
message LostObjectData {
// tracking UUID of the lost object
string tracking_uuid = 1;
// timestamp of the frame where the object appeared first time (New in ByteTrack)
google.protobuf.Timestamp first_time_appeared = 2;
// timestamp of the frame where ByteTrack change the tracking status of the object to Removed
google.protobuf.Timestamp last_time_appeared = 3;
// crop of best appearance of the object in tracklet - NOT SUPPORTED YET
optional innovatrics.embedded.stream_processor.common.Image best_crop_image = 4;
}
common
You can find the innovatrics.embedded.stream_processor.common protobuf message structure below.
syntax = "proto3";
package innovatrics.embedded.stream_processor.common;
/// Template data
message TemplateData {
bytes template = 1;
}
/// Image message
message Image {
// width of the image
uint32 width = 1;
// height of the image
uint32 height = 2;
// image data in specified format
optional bytes data = 3;
// format of the image data specified in settings
ImageFormat image_format = 4;
}
// Image format
enum ImageFormat {
// default
Raw = 0;
// Jpeg
Jpeg = 1;
// Png
Png = 2;
reserved 3 to max;
}
// Error message
message Error {
// error message
string message = 1;
}
// Normalized bounding box
message BoundingBox {
// X coordinate of left upper corner of bounding box relative to full frame - range <0,1>
float x = 1;
// Y coordinate of left upper corner of bounding box relative to full frame - range <0,1>
float y = 2;
// width of bounding box relative to width of full frame - range <0,1>
float width = 3;
// height of bounding box relative to height of full frame - range <0,1>
float height = 4;
}
// String meta data
message MetaData {
string key = 1;
string value = 2;
}
health
You can find the innovatrics.embedded.stream_processor.health protobuf message structure below.
innovatrics.embedded.stream_processor.health imports also common.proto
syntax = "proto3";
package innovatrics.embedded.stream_processor.health;
// Used for reporting a status of stream processor
message HealthReport {
// Stream processor version
string version = 1;
// Status of the stream processor
HealthStatus status = 2;
}
// Possible statuses of stream processor
enum HealthStatus {
// Indicates stream processor is online
Online = 0;
// Indicates stream processor is offline
Offline = 1;
// Indicates stream processor has disconnected
OfflineDisconnected = 2;
reserved 3 to max;
}
db
You can find the innovatrics.embedded.stream_processor.db protobuf message structure below.
innovatrics.embedded.stream_processor.db.proto imports also common.proto
syntax = "proto3";
package innovatrics.embedded.stream_processor.db;
import "innovatrics/embedded/stream_processor/common.proto";
// Request database update
message UpdateRequest {
// From DSID
string from_dsid = 1;
// To DSID
string to_dsid = 2;
// Failure DSID
string failure_dsid = 3;
// Clear database flag
bool clear = 4;
// Update / insert
repeated MemberUpsert updates = 5;
// Delete
repeated MemberDelete deletes = 6;
}
// Set or update user
message MemberUpsert {
// Member info
MemberInfo member_info = 1;
// Templates
repeated innovatrics.embedded.stream_processor.common.TemplateData templates = 2;
// Member metadata
repeated innovatrics.embedded.stream_processor.common.MetaData meta_data = 3;
}
// Users to delete
message MemberDelete {
// Member info
MemberInfo member_info = 1;
}
// Member info used to identify user
message MemberInfo {
// uuid - unique 36 character string (32 digits separated by hyphens)
string uuid = 1;
}
// Update response message
message UpdateResponse {
// DSID
string current_dsid = 1;
// Error message in case of an error
optional string error_message = 2;
}
// Request for status
message StatusRequest {}
// Status response message
message StatusResponse {
// DSID
string current_dsid = 1;
// Error message in case of an error
optional string error_message = 2;
}
user
You can find the innovatrics.embedded.stream_processor.user protobuf message structure below.
innovatrics.embedded.stream_processor.user imports also common.proto
syntax = "proto3";
package innovatrics.embedded.stream_processor.user;
import "innovatrics/embedded/stream_processor/common.proto";
// Record stored in database
message Record {
// Record UUID
string uuid = 1;
// Face templates
repeated innovatrics.embedded.stream_processor.common.TemplateData templates = 2;
// Metadata
repeated innovatrics.embedded.stream_processor.common.MetaData metadata = 3;
}
// A collection of Records
message Records {
// Records
repeated Record records = 1;
}